 400 025 3599
400 025 3599 




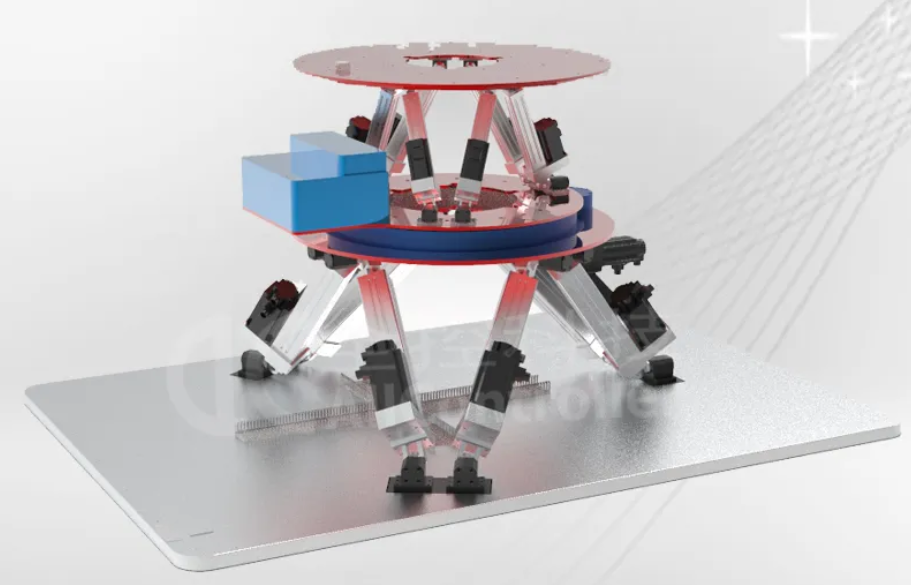
“六自由度機械臂實驗教學平臺”是某科技大學電氣與自動化工程學院研制的。它是本科生進行創新實驗和課程設計的實驗教學平臺。實驗教學平臺由6自由度機械臂機械本體、驅動裝置、傳感器系統和嵌入式控制系統組成。六個自由度分別是大臂的前后部,內外的擺動,手臂的彎曲,手腕的轉動,手腕的擺動,手掌的張開。機械結構采用輕質鋁合金設計。驅動裝置由轉向器和直流電動機驅動。傳感器系統包括激光傳感器、姿態傳感器和陀螺儀。控制系統采用嵌入式系統設計。
六自由度機器人手臂實驗教學平臺的開合度是由直流電機驅動的。可利用PWM信號進行開合速度的控制,完成對物體的抓取動作。其余的大臂、小臂及手腕三處的五個自由度均采用舵機進行控制,通過激光傳感器、姿態傳感器目標對象的定位,根據系統模型來計算移動目標位置信號的每個方向的自由度,在按照控制算法的設計實現穩定可靠的各自由度控制。還可以利用教學功能,對不同位置的物體進行抓取和擺放實驗。在抓取和放置物體的過程中,腕關節根據陀螺的測試和控制器的控制輸出自動維持平衡狀態。控制系統由嵌入式工業控制單元和嵌入式微控制器組成。工控機是系統的主要控制單元。采用VC編程技術。嵌入式微控制器主要用于實現腕關節的自動平衡控制,用C語言控制程序設計。

六自由度機器人手臂實驗教學平臺可以為本科生開展以下實驗內容,主要包括“機器人手臂單關節控制實驗”、“機器人手臂的手部自平衡控制實驗”、“機器人手臂運動的示教再現實驗”、“機器人手臂對隨機目標物體的抓取、移動與放置實驗”,同時也可進行語音命令信號的識別與處理實驗等。
六自由度機器人手臂實驗教學平臺的開合度是由直流電機驅動的。可利用PWM信號進行開合速度的控制,完成對物體的抓取動作。其余的大臂、小臂及手腕三處的五個自由度均采用舵機進行控制,通過激光傳感器、姿態傳感器目標對象的定位,根據系統模型來計算移動目標位置信號的每個方向的自由度,在按照控制算法的設計實現穩定可靠的各自由度控制。還可以利用教學功能,對不同位置的物體進行抓取和擺放實驗。在抓取和放置物體的過程中,腕關節根據陀螺的測試和控制器的控制輸出自動維持平衡狀態。控制系統由嵌入式工業控制單元和嵌入式微控制器組成。工控機是系統的主要控制單元。采用VC編程技術。嵌入式微控制器主要用于實現腕關節的自動平衡控制,用C語言控制程序設計。
六自由度機器人手臂實驗教學平臺可以為本科生開展以下實驗內容,主要包括“機器人手臂單關節控制實驗”、“機器人手臂的手部自平衡控制實驗”、“機器人手臂運動的示教再現實驗”、“機器人手臂對隨機目標物體的抓取、移動與放置實驗”,同時也可進行語音命令信號的識別與處理實驗等。
關鍵詞: 六自由度




 在線咨詢
在線咨詢 




